Our team’s robot for ME 210: Introduction to Mechatronics.
We designed and built an autonomous, Arduino-powered robot to compete against other robots. The robot had to launch foam balls into goals on the other side of an arena. Our bot used several ultrasonic and infrared tape sensors to align itself with the goals.
The robot shot the balls by turning a revolver and launching the balls with a flywheel. The images show the CAD renderings of the ball pitching mechanism.
See our team’s website here
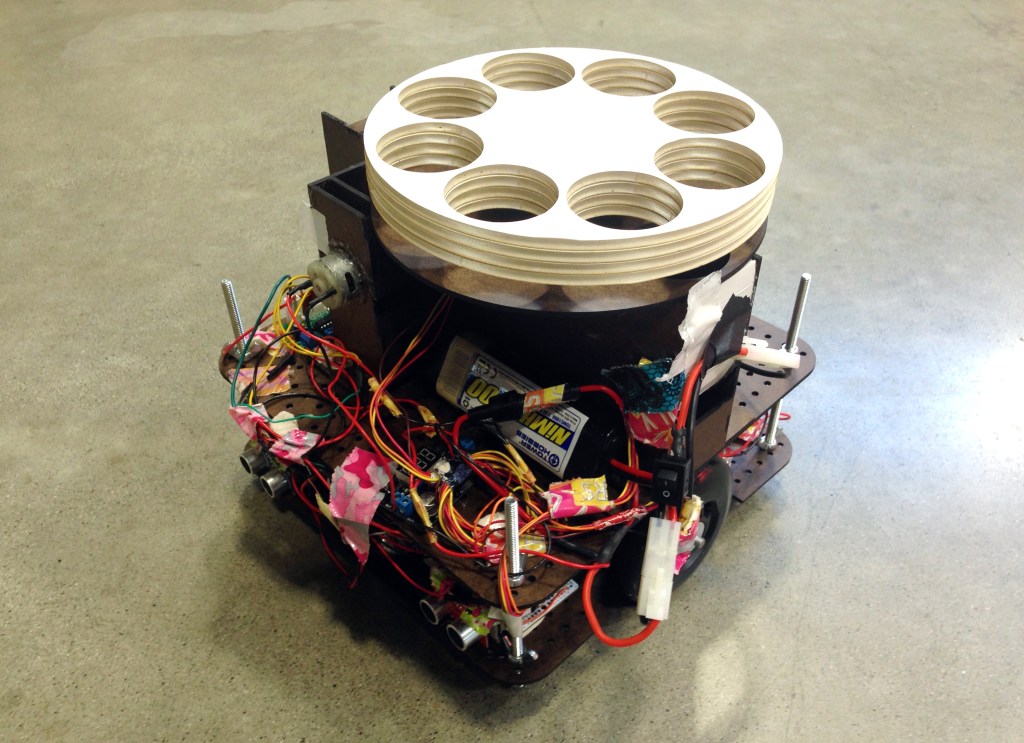
Complete Robot 
Team Photo 
Pitching Mechanism 
Cutaway of Pitching Mechanism 
Up Late 
Assembly
