Our team built a motorized tunnel crawler for ME 112: Mechanical Systems Design.

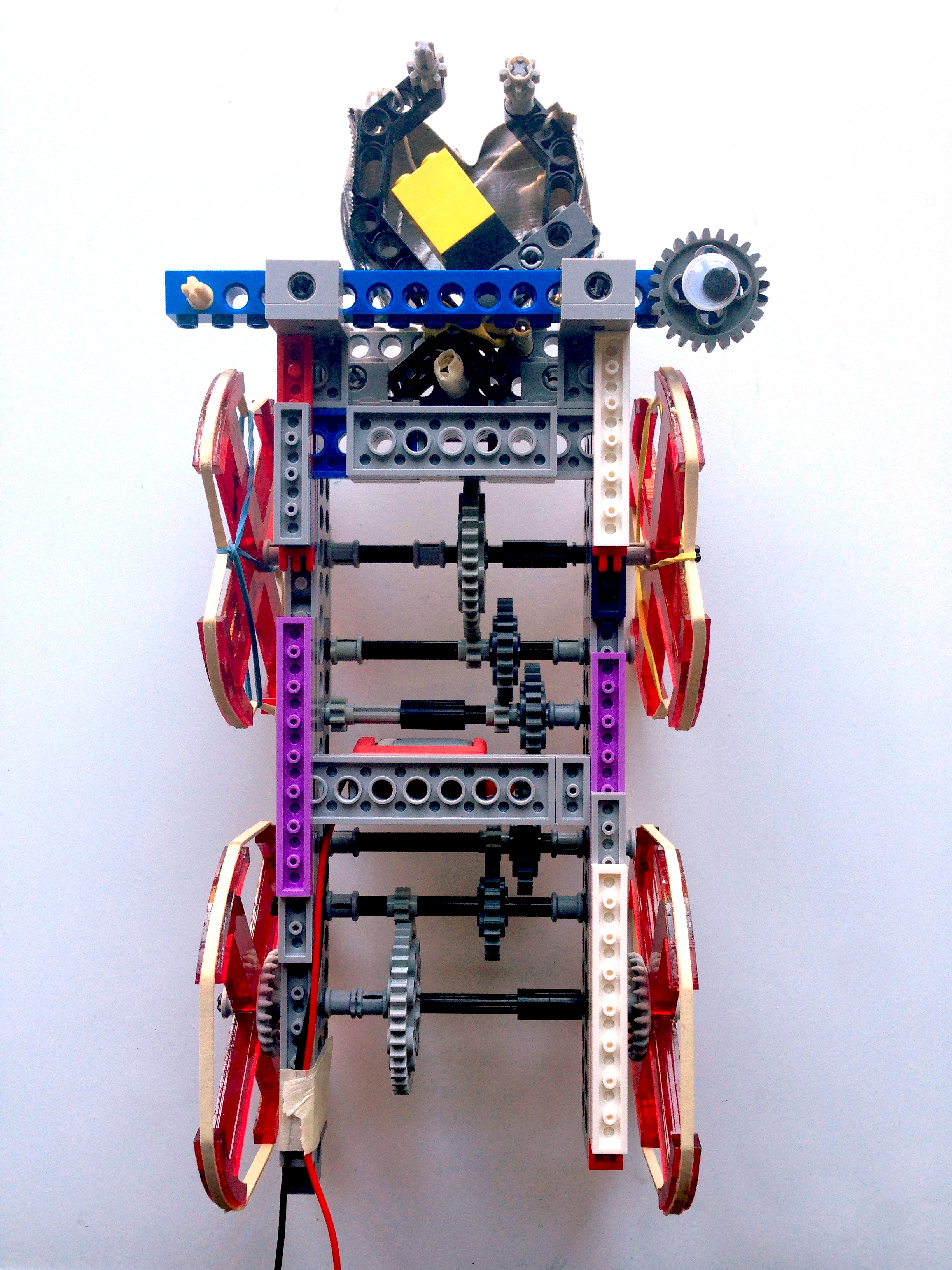
The crawler needed to traverse a tunnel with obstacles and retrieve a “bomb” at the opposite end of the channel. Our Lego critter features wheg-style wheels and a high gear ratio of 45:1 to climb over obstructions to reach the bomb. We included a path alignment bar (complete with decorative googly eye) to prevent our crawler from colliding and stalling on the channel’s walls. Our grabber mechanism clamped onto the bomb and held it as the bug backed out of the tunnel.
